叉积
叉积的计算是线段方法的核心。叉积被解释为由点(0,0),p1,p2,和p1+p2=(x1+x2,y1+y2)所构成的平行四边形的有向面积。p1*p2 = x1*y2-x2*y1。结果的正负代表方向。其中方向符合右手定则。即用右手从p1出发,沿小于180度的方向向p2握拳,此时大拇指的朝向即为叉积方向。这里大拇指向上表示正方向(叉积为正),大拇指向下表示负方向(叉积为负)。
利用叉积,我们立刻可以得出一个简单的性质。若p1*p2大于0,则相对于原点来说,p1位于p2的顺时针方向,若叉积为负,则p1位于p2的逆时针方向。如果是零,则三点共线。
在上述基础上延伸,可得到相对与公共端点p0, p1是位于p2的顺时针还是逆时针方向(考虑的都是小于等于180读,即顺时针还是逆时针更接近)。此时只需要求向量$p_0p_1$与$p_0p_2$的叉积即可。
连续线段是向左转还是向右转
两条连续线段,求$p_0p1$和$p_1p_2$在p1点选择方向。利用上述的相对与公共端点的另外两个点的位置关系即可求出。在这里以p0为公共端点,求p1与p2的位置关系。
两条线段是否相交
判断两条线段是否相交,可以向考虑一个点是在一条直线的左侧还是右侧。如果能够获得次结果,则两条直线相交的条件是,任一条线的两个端点在另一条线的两侧(或者恰巧在线上)。此时再来考虑如何确定一个点是在线段的那一侧。这时我们可以发现,我们依然可以利用相对与公共端点的另外两个点的位置关系。在这里,我们以直线的任意一个端点作为公共端点,求另外两个点的位置关系。这里不必获得具体的点在直线的左侧还是右侧,因为选取不同线段端点为公共端点会产生不同的结果,而且没有必要确定在哪一测,我们只需要判断一条线段的两个端点是否在另一条线段的两侧即可,此时我们在判断A线段的两个端点是否在B线段两侧时,我们只用保证选择的B的公共端点一致即可。如果选择公共端点一致,而对A的两个端点相对于线段B得出来的叉积符号相反就说明在A的两个端点在线段B的两侧。还有一个特殊情况就是一个线段的端点恰巧在另一条线段上,此时叉积为0。在叉积为0时确定点是否在线上是是否简单的,因为此时只有两种情况,一种是点在线上,另一种是点在线段延长线上。此时判断只需比较坐标大小即可。由此可得如下程序:
1 | struct points |
确定任意一对线段是否相交
对于n条线段,确定两条线段是否相交,如果使用最简单的方法,即每两个线段相比较,则复杂度将会是O(n^2)这在线段较多的时候显然是无法接受的,于是这里提出了一个“扫除”的操作,可以使得复杂度降低到O(nlogn)。具体解释如下:
在扫除过程中,一条假想的扫除线穿过一个给定的几何物体集合,并且通常是从前先后扫除。我们将线段的端点按照从左向右排序,在扫除线移动的过程中,遇到线段的端点就判断相关线段是否相交。
线段排序
我们将在扫除线处,对与扫除线相交的线段进行排序,排序的规则是与扫除线交点的y坐标(这里假设不存在竖直的线,实际算法中存在竖直线也是无所谓的。)。将y坐标的高的放上方。当扫除线在x时,两条线段都与扫除线相交,则称这两条线是在x可比较的,就可以使用上述方法进行排序。在扫除线遇到线段左端点时就将该线段加入排序,当扫除线遇到右端点时从排序中删除。在不同x处排序完全前序可能不同,如果存在两条线段,随着扫除线的移动,排序顺序由A>B变成B>=A,则说明线段相交。
移动扫除线
扫除线算法要维护两组数据:
1.扫除线状态:给出了与扫除线相交的物体之间的关系。
2.时间点调度:是一个按照x坐标从左到右排序的时间点序列。随着扫除线的移动,每当遇到时间点的x坐标就会停止,处理事件,然后重新扫除,扫除线状态只会在时间点出改变。
程序流程
1.首先将线段端点集合进行从左到右排序。在这里,如果两个点的x坐标一致,则左端点的排在前面(这是为了处理两条线段在端点处相交),如果x一致,且都是同一类型的端点(左右)则将y低的放前面。
2.初始化一个空的线段排序集合。这里为了保证速度更快,使用红黑树来实现排序,将比较方式换成线段排序部分所描述的。这里直接判断交点y坐标是不可取的(麻烦且不准确),依然可以利用叉积进行判断。在判断线段相交是,我们会判断一个线段的两个端点是否在另一条线段的两边。这里的判断与之类似,如果一个线段A的端点的两个端点在另一条线段B的同一侧时,我们可以判断出A整体是在B的上方或者下方,此时在x处的两条线段与扫除线的交点y坐标就也确定了。如果两条线段不相交,则一定会出现这种情况,如果两条线段相交当然可以直接返回,说明存在线段相交,但如果使用STL中的红黑树,则不存在这种操作(其实是有的,可以定义一个static类型,当在判断函数中两条线段相交,则将该值置一,每次插入是,检查插入后该值是否变成1了)。此时,由下面的流程可知,其实只会在线段的左端点进行排序操作(其实在删除时也会进行排序,但不影响程序的准确性),此时只需判断两条线段的左端点的y坐标,那个高则哪个在上。
3.不断取出从第一步中的排序好的点,判断端点类型,如果是左端点,则将该线段插入线段排序集合中,同时,取出其上下两条线段(如果存在),分别与该线段判断是否相交,如果相交,则结束。否则继续扫除。如果是右端点,则取出其上下两条线段(如果存在),判断上下两条线是否相交,如果相交则结束,否则从排序集合中删除该线段继续操作。如果一直到所以线段都添加后删除了,依然没有两条线段相交,则说明不存在两条线段相交。
正确性
命题:该方法能够正确判断线段相交。
我们需要证明该命题的充分必要性。
充分性
即该方法确定存在线段相交则必然存在线段相交。这是很显然的,因为我们在判断线段相交时是使用了基本的线段相交算法,因此如果该算法判断线段相交,则必然存在线段相交。
必要性
即如果存在线段相交,则该方法一定可以检测出来。假设线段A,B相交,在其中一条线A已近加入排序集合的情况下,B进入集合会存在两种情况。1.与线段A排序相邻,此时由于插入时会判断与插入直线相邻的线段关系,直接可以得出线段相交。2.在A与B之间存在线段C(之间存在多条线段与存在一条是类似的),由于C不与这两条线相交,则在A,B交点前C已被移除排序集合。此时,由于移除集合时会判断被移除的线段上下两条线段是否相交,此时也能够获得线段相交。
代码
1 |
|
凸包
点集Q的凸包是最小的一个凸多边形P,满足Q中每个点都在P的边界上或者P的内部。凸包在计算机几何学中是十分有用的,例如我们可以利用凸包在O(n)(n为凸包的边数)的时间复杂度下找到点集中距离最远的两个点。获取凸包有很多方法,复杂度都能够达到O(nlogn)(n为点的数目)。这里介绍的方法为Graham扫描法。
Graham扫描法通过维持一个关于候选点的栈来解决凸包问题。输入集合每个点都会被压入栈一次,非凸包的顶点最终会被弹出栈,最终栈中将只包含凸包的顶点。
程序流程:
1.首先选出凸包最下面的点,该点一定是y坐标最小的点,如果有多个个点y坐标一致,则找到x坐标最小的点,这样,改点必然属于凸包的顶点。
2.将剩下来的点按照与第一步中选择的点为极点所成的极角进行排序,这里排序使用点在线段的左边这一判断方式即可。
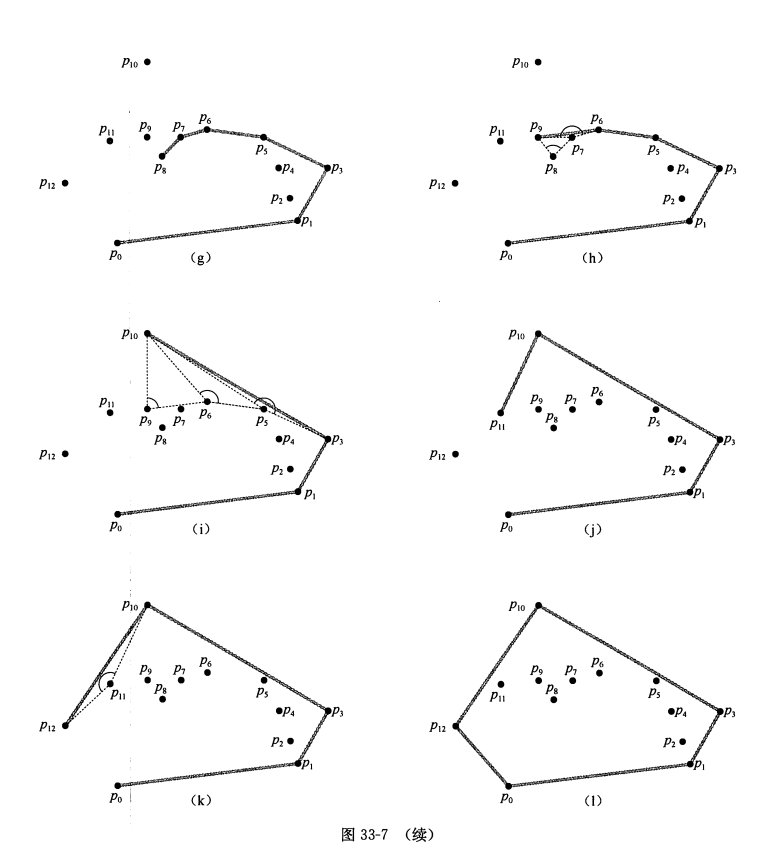
3.将第一步选择的点压入一个栈中,将第二步中排序的第一个取出压入栈。之后依次取出第二步中排序的点,将该点与栈顶的两个点进行比较,判断是否三个点构成的两条线段是向左转,如果是,则直接将该点压入栈,否则删除栈顶元素,重复进行与栈顶两个元素进行的操作,如果一直删除到栈只剩下一个元素还没有向左转,则将该节点压入栈。这样依次对所以排序的节点指向上述操作。最终栈内元素即为凸包的顶点。
下图展示了操作流程: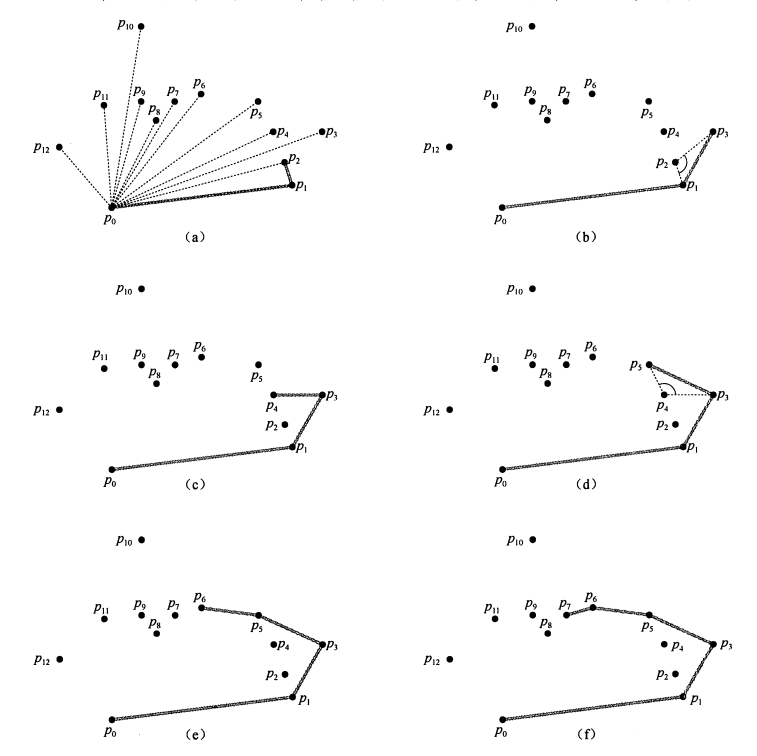
利用凸包获取点集中最远的两个点
显然距离最远的点一定是凸包中的点之间的距离。首先利用上面的Graham扫描法获得凸包。而后任选一条凸包的边,找到凸包中距离该边最远的点,寻找也可以使用叉积实现,沿着选择的边,逆时针查找凸包的边,相对于选择的线段(将选择的线段平移至与接下来进行比较的边共起点,使选择的边与比较的边共右端点),如果边是向右转的,则比较的线段对左端点是当前距离该线段最远的点,接着继续比较。直到遇到第一个是左旋的,此时该线段的右端点即为距离被选择的边最远的点。比较该点距离被选线段的两个端点哪个远并记录。而后逆时针依次寻找所有距离凸包边最远的点,利用边移动,对应的距离最远的点也同步移动,即选择的边是原被选边的右边,则距离该边最远的点是原来距离原被选的边的右边,则可以依次比较点到线段两个端点的距离。这样就可以找到最远两个点。
代码:凸包与点集中最远两个点
1 |
|
寻找点集中最近两个点之间的距离
最笨且可靠的方法,比较任意两个点之间的距离,确定最近距离。但这个方法的时间复杂度是O(n^2)。这显然是无法接受的。此时我们可以考虑使用空间换时间的方式,采用递归的方法进行计算。
基本思路为:将点集分别按照x坐标和y坐标排序。选择一条竖直线,将点集分为两组(竖线上的点可以随意分到左边或者右边),分别递归的获取两组点集的最小距离而后对两个点集进行合并操作。需要注意的是,在划分时,需要将分别按照x,y已排列好的集合进行划分,同时要保证划分到两个集合依然保持排序好的状态,这一点是很简单的,看代码就能明白。最关键的是合并的操作。分别获取两个集合的最小距离后,可以获得较小者min。此时不能直接返回这个较小者,因为可以存在两个点分别在左边集合和右边集合。此时处理方式为,我们已经知道了左右两个集合最小的距离,那么如果存在一个点对分别在两个点集中,则一定是在分割线两侧min距离以内。如下图所示:

此时,我们就可以先限定一部分点。随后,考虑这些点如何求最小距离,这里利用了一个原理,如上图右侧所示,如果存在距离小于min的点对,则在一个点与之前点(y值比其大的点)比较之后,最多只用比较随后的七个点。这是由于两边点集最小距离是min,所以在一个以分割线为中心长为2*min,宽为min的区域最多存在八个点,超过八个点后的点距离绝对都打于min。利用这个原理,我们将按照y坐标排序好的点集根据左右min的限制提取出来,以每个点开始比较其后续的七个点(如果有的话)。最终确定这个区域内最短距离,而后与先前的min比较取最小值。
程序如下:
1 |
|
取100个点,程序执行结果为:
1 | min1 dis^2 is: 117 |
程序执行正确,且计算复杂度确实大幅降低,达到O(nlog(n))量级。